Note
Click here to download the full example code
Applying image-based deformations to streamlines
This example shows how to register streamlines into a template space by applying non-rigid deformations.
At times we will be interested in bringing a set of streamlines into some common, reference space to compute statistics out of the registered streamlines. For a discussion on the effects of spatial normalization approaches on tractography the work by Green et al. [Greene17] can be read.
For brevity, we will include in this example only streamlines going through the corpus callosum connecting left to right superior frontal cortex. The process of tracking and finding these streamlines is fully demonstrated in the Connectivity Matrices, ROI Intersections and Density Maps example. If this example has been run, we can read the streamlines from file. Otherwise, we’ll run that example first, by importing it. This provides us with all of the variables that were created in that example.
In order to get the deformation field, we will first use two b0 volumes. Both moving and static images are assumed to be in RAS. The first one will be the b0 from the Stanford HARDI dataset:
from os.path import join as pjoin
import numpy as np
import nibabel as nib
from dipy.core.gradients import gradient_table
from dipy.data import get_fnames
from dipy.io.gradients import read_bvals_bvecs
from dipy.io.image import load_nifti_data, load_nifti, save_nifti
hardi_fname, hardi_bval_fname, hardi_bvec_fname = get_fnames('stanford_hardi')
data, affine, hardi_img = load_nifti(hardi_fname, return_img=True)
vox_size = hardi_img.header.get_zooms()[0]
bvals, bvecs = read_bvals_bvecs(hardi_bval_fname, hardi_bvec_fname)
gtab = gradient_table(bvals, bvecs)
The second one will be the T2-contrast MNI template image, which we’ll need to reslice to 2x2x2 mm isotropic voxel resolution to match the HARDI data.
from dipy.data.fetcher import (fetch_mni_template, read_mni_template)
from dipy.align.reslice import reslice
fetch_mni_template()
img_t2_mni = read_mni_template(version="a", contrast="T2")
new_zooms = (2., 2., 2.)
data2, affine2 = reslice(np.asarray(img_t2_mni.dataobj), img_t2_mni.affine,
img_t2_mni.header.get_zooms(), new_zooms)
img_t2_mni = nib.Nifti1Image(data2, affine=affine2)
We filter the diffusion data from the Stanford HARDI dataset to find all the b0 images.
b0_idx_stanford = np.where(gtab.b0s_mask)[0]
b0_data_stanford = data[..., b0_idx_stanford]
We then remove the skull from them:
from dipy.segment.mask import median_otsu
b0_masked_stanford, _ = median_otsu(b0_data_stanford,
vol_idx=list(range(b0_data_stanford.shape[-1])),
median_radius=4, numpass=4)
And go on to compute the Stanford HARDI dataset mean b0 image.
mean_b0_masked_stanford = np.mean(b0_masked_stanford, axis=3,
dtype=data.dtype)
We will register the mean b0 to the MNI T2 image template non-rigidly to obtain the deformation field that will be applied to the streamlines. This is just one of the strategies that can be used to obtain an appropriate deformation field. Other strategies include computing an FA template map as the static image, and registering the FA map of the moving image to it. This may may eventually lead to results with improved accuracy, since a T2-contrast template image as the target for normalization does not provide optimal tissue contrast for maximal SyN performance.
We will first perform an affine registration to roughly align the two volumes:
from dipy.align.imaffine import (MutualInformationMetric, AffineRegistration,
transform_origins)
from dipy.align.transforms import (TranslationTransform3D, RigidTransform3D,
AffineTransform3D)
static = np.asarray(img_t2_mni.dataobj)
static_affine = img_t2_mni.affine
moving = mean_b0_masked_stanford
moving_affine = hardi_img.affine
We estimate an affine that maps the origin of the moving image to that of the static image. We can then use this later to account for the offsets of each image.
affine_map = transform_origins(static, static_affine, moving, moving_affine)
We specify the mismatch metric:
nbins = 32
sampling_prop = None
metric = MutualInformationMetric(nbins, sampling_prop)
As well as the optimization strategy:
level_iters = [10, 10, 5]
sigmas = [3.0, 1.0, 0.0]
factors = [4, 2, 1]
affine_reg = AffineRegistration(metric=metric, level_iters=level_iters,
sigmas=sigmas, factors=factors)
transform = TranslationTransform3D()
params0 = None
translation = affine_reg.optimize(static, moving, transform, params0,
static_affine, moving_affine)
transformed = translation.transform(moving)
transform = RigidTransform3D()
rigid_map = affine_reg.optimize(static, moving, transform, params0,
static_affine, moving_affine,
starting_affine=translation.affine)
transformed = rigid_map.transform(moving)
transform = AffineTransform3D()
Optimizing level 2 [max iter: 10]
Optimizing level 1 [max iter: 10]
Optimizing level 0 [max iter: 5]
Optimizing level 2 [max iter: 10]
Optimizing level 1 [max iter: 10]
Optimizing level 0 [max iter: 5]
We bump up the iterations to get a more exact fit:
affine_reg.level_iters = [1000, 1000, 100]
highres_map = affine_reg.optimize(static, moving, transform, params0,
static_affine, moving_affine,
starting_affine=rigid_map.affine)
transformed = highres_map.transform(moving)
Optimizing level 2 [max iter: 1000]
Optimizing level 1 [max iter: 1000]
Optimizing level 0 [max iter: 100]
We now perform the non-rigid deformation using the Symmetric Diffeomorphic Registration (SyN) Algorithm proposed by Avants et al. [Avants09] (also implemented in the ANTs software [Avants11]):
from dipy.align.imwarp import SymmetricDiffeomorphicRegistration
from dipy.align.metrics import CCMetric
metric = CCMetric(3)
level_iters = [10, 10, 5]
sdr = SymmetricDiffeomorphicRegistration(metric, level_iters)
mapping = sdr.optimize(static, moving, static_affine, moving_affine,
highres_map.affine)
warped_moving = mapping.transform(moving)
We show the registration result with:
from dipy.viz import regtools
regtools.overlay_slices(static, warped_moving, None, 0, 'Static', 'Moving',
'transformed_sagittal.png')
regtools.overlay_slices(static, warped_moving, None, 1, 'Static', 'Moving',
'transformed_coronal.png')
regtools.overlay_slices(static, warped_moving, None, 2, 'Static', 'Moving',
'transformed_axial.png')



<Figure size 640x480 with 3 Axes>



Let’s now fetch a set of streamlines from the Stanford HARDI dataset. Those streamlines were generated during the Connectivity Matrices, ROI Intersections and Density Maps example.
We read the streamlines from file in voxel space:
from dipy.data import fetch_stanford_tracks
from dipy.io.streamline import load_tractogram
streamlines_files = fetch_stanford_tracks()
lr_superiorfrontal_path = pjoin(streamlines_files[1],
'hardi-lr-superiorfrontal.trk')
sft = load_tractogram(lr_superiorfrontal_path, 'same')
We then apply the obtained deformation field to the streamlines. Note that the process can be sensitive to image orientation and voxel resolution. Thus, we first apply the non-rigid warping and simultaneously apply a computed rigid affine transformation whose extents must be corrected to account for the different voxel grids of the moving and static images.
from dipy.tracking.streamline import deform_streamlines
# Create an isocentered affine
target_isocenter = np.diag(np.array([-vox_size, vox_size, vox_size, 1]))
# Take the off-origin affine capturing the extent contrast between the mean b0
# image and the template
origin_affine = affine_map.affine.copy()
In order to align the FOV of the template and the mirror image of the streamlines, we first need to flip the sign on the x-offset and y-offset so that we get the mirror image of the forward deformation field.
We need to use the information about the origin offsets (i.e. between the
static and moving images) that we obtained using transform_origins():
origin_affine[0][3] = -origin_affine[0][3]
origin_affine[1][3] = -origin_affine[1][3]
transform_origins() returns this affine transformation with (1, 1, 1)
zooms and not (2, 2, 2), which means that the offsets need to be scaled by 2.
Thus, we scale z by the voxel size:
origin_affine[2][3] = origin_affine[2][3]/vox_size
But when scaling the z-offset, we are also implicitly scaling the y-offset as well (by 1/2).Thus we need to correct for this by only scaling the y by the square of the voxel size (1/4, and not 1/2):
origin_affine[1][3] = origin_affine[1][3]/vox_size**2
# Apply the deformation and correct for the extents
mni_streamlines = deform_streamlines(
sft.streamlines, deform_field=mapping.get_forward_field(),
stream_to_current_grid=target_isocenter,
current_grid_to_world=origin_affine, stream_to_ref_grid=target_isocenter,
ref_grid_to_world=np.eye(4))
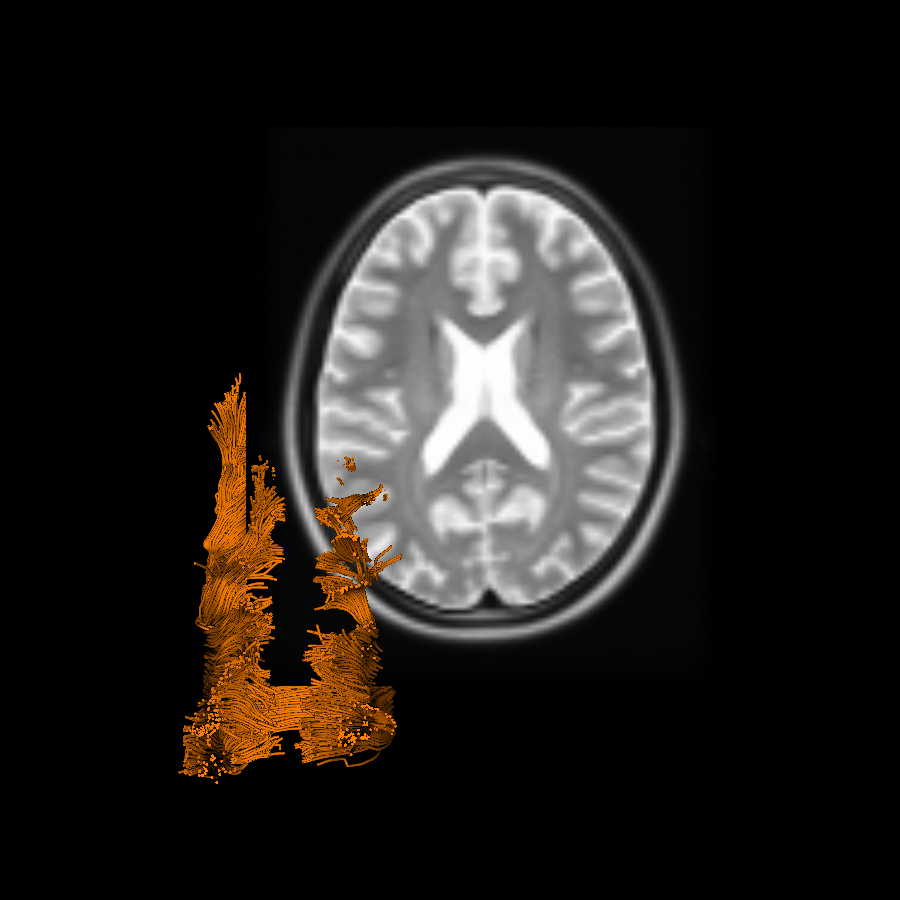
We display the original streamlines and the registered streamlines:
from dipy.viz import has_fury
def show_template_bundles(bundles, show=True, fname=None):
scene = window.Scene()
template_actor = actor.slicer(static)
scene.add(template_actor)
lines_actor = actor.streamtube(bundles, window.colors.orange,
linewidth=0.3)
scene.add(lines_actor)
if show:
window.show(scene)
if fname is not None:
window.record(scene, n_frames=1, out_path=fname, size=(900, 900))
if has_fury:
from fury import actor, window
show_template_bundles(mni_streamlines, show=False,
fname='streamlines_DSN_MNI.png')
"""
.. figure:: streamlines_DSN_MNI.png
:align: center
Streamlines before and after registration.
The corpus callosum bundles have been deformed to adapt to the MNI
template space.
"""
Finally, we save the registered streamlines:
from dipy.io.stateful_tractogram import Space, StatefulTractogram
from dipy.io.streamline import save_tractogram
sft = StatefulTractogram(mni_streamlines, img_t2_mni, Space.RASMM)
save_tractogram(sft, 'mni-lr-superiorfrontal.trk', bbox_valid_check=False)
True
References
Avants, B. B., Epstein, C. L., Grossman, M., & Gee, J. C. (2009). Symmetric Diffeomorphic Image Registration with Cross-Correlation: Evaluating Automated Labeling of Elderly and Neurodegenerative Brain, 12(1), 26-41.
Avants, B. B., Tustison, N., & Song, G. (2011). Advanced Normalization Tools (ANTS), 1-35.
Greene, C., Cieslak, M., & Grafton, S. T. (2017). Effect of different spatial normalization approaches on tractography and structural brain networks. Network Neuroscience, 1-19.
Total running time of the script: ( 0 minutes 58.789 seconds)